
Omweg heeft geen stuurwiel zoals je zo vaak op zeiljachten ziet maar een helmstok. Dat heeft zo zijn voor- en nadelen. Daarover gaan we het in dit artikel niet hebben, maar wel over hoe je het sturen van de boot automatisch kan laten plaatsvinden. Want niemand die de oceaan oversteekt gaat de hele oversteek (soms wekenlang!) met de hand sturen. Dat is gewoon geen doen met een tweekoppige bemanning. Dat sturen laten ook wij dus graag over aan een stuurautomaat, in vliegtuigen ook wel genoemd "automatische piloot". We hebben twee soorten stuurautomaten aan boord:
- Windpilot
- Dit is een mechanisch apparaat bestaande uit een windvaan en een servoroer. De afwijkingen in windrichting worden overgebracht op een in het water stekend pendulumroer dat via wat lijnen en katrollen de helmstok bedient. Het klinkt ingewikkeld en dat is het eigenlijk ook. Het apparaat houdt de boot op vernuftige wijze op een vaste koers ten opzichte van de wind. De wind ja, en niet een compaskoers. Want je hebt de zeilen opgezet voor een bepaalde windrichting en als de wind ongemerkt draait tijdens het eten koken, slapen of andere boordactiviteiten heb je liever dat je compaskoers verandert dan dat de wind ineens vanaf de andere kant in je zeilen blaast. De koers kun je altijd wel weer bijstellen en meestal moet je dan ook "iets met de zeilen doen". Zo'n windpilot is een fantastische uitvinding en het is onze favoriete stuurautomaat omdat hij onverstoorbaar, onafhankelijk van computers, stroom etc. werkt. Hoe harder het waait, hoe beter de windpilot werkt. Hoe harder de boot vaart, hoe meer kracht het servoroer krijgt. Maar ergo; bij lichte wind of wanneer je op de motor vaart (en dus je eigen wind veroorzaakt die dan altijd van voren komt) nemen de prestaties van de windpilot snel af, of met andere woorden: je zwalkt dan alle kanten op.
- Tiller pilot
- Dit is een elektronisch apparaat met een uitschuifbare steel die je aan de helmstok haakt. Hij is aangesloten op de GPS en is heel geschikt om de boot op een vaste compaskoers te houden als de wind te zwak is of wanneer je op de motor vaart. Maar met hardere wind, hogere snelheiden en ruige zee krijgt hij het al snel moeilijk omdat de benodigde krachten om de boot te besturen flink oplopen.
Wie goed heeft opgelet zal hebben opgemerkt dat de mechanische windpilot en de elektronische tiller pilot elkaar prachtig mooi aanvullen en dat je eigenlijk beide nodig hebt. En dat is dan ook precies waarom we beide aan boord hebben.
Probleem!
Maar nu is er een probleem! Omweg heeft geen stuurwiel maar een helmstok. En omdat je dat niet zo vaak ziet op grotere zeilboten denken fabrikanten van stuurautomaten dat een helmstok stuurautomaat alleen maar gebruikt wordt op kleine lichte boten. De tiller pilot is het zwaarste model dat we konden vinden maar hij is nog steeds veel te licht. Hij kan maar een kracht van 85 kilo ontwikkelen en omdat hij niet aan het uiteinde van de helmstok zit maar relatief dicht bij de roeras aangrijpt is deze kracht vanwege de kortere hefboom ook niet bepaald overdreven. En als er een golf tegen het roer aan beukt dan krijgt het apparaat een harde klap. En als de boot door een harde windvlaag oploeft dan is de uitslag en de kracht gewoon te gering om het op te lossen. Natuurlijk moet je dan de zeilen reven maar daarom is het juist handig als de stuurautomaat dan in ieder geval in staat blijft het sturen zelfstandig voor zijn rekening te nemen.
Tijdens onze oversteek van de Pacific hebben we de elektronische stuurautomaat veel gebruikt omdat de wind van achteren kwam en er na aftrek van de eigen snelheid nog maar weinig netto windsnelheid overbleef. Te weinig om de windpilot effectief te laten werken. Helaas had de elektronische stuurautomaat het voor het bereiken van de Markiezen al begeven. Overbelast, doorgesleten, dolgedraaid. Tsja, we steken niet het IJsselmeer over maar de Pacific he? De elektronica was nog goed maar het mechaniek was volledig op. Gelukkig hadden we een reserve stuurautomaat meegenomen, maar die was bij aankomst ook alweer half versleten. Die stuurautomaten kosten zo'n 700 Euro per stuk dus je neemt ook geen krat van die dingen mee. Heel internet afgezocht maar er zijn gewoon geen stuurautomaten die krachtig genoeg zijn, of je komt in de categorie "hydrauliek" terecht en dat wordt dan een omslachtige, tijdrovende en ook dure operatie. Dus hoog tijd om zelf iets in elkaar te zetten...
Zoektocht

De elektronica van de defecte stuurautomaat was nog goed; eigenlijk was er alleen een verbeterd mechaniek nodig. Zo'n in- en uitschuivend ding noemen ze een "linear actuator", dus dat was waar we op internet naar gingen zoeken. Er waren wel wat eisen:
- De motor zou moeten lopen op 12 Volt. Dat is nou eenmaal de boordspanning van ons schip en spanning omvormen is niet efficient.
- Veel kracht. Niet alleen om het tekort aan kracht aan te vullen, maar ook omdat ik het apparaat liever nog dichter bij de roeras zou willen zetten. Eenvoudige natuurkunde leert ons dat wanneer we de afstand halveren dat de benodigde kracht dan verdubbelt. En halveren van de afstand was nou net precies wat ik wilde doen want dan kon de linear actuator mooi tegen het achterschot worden gemonteerd. Bijkomend voordeel is dan dat de benodigde uitslag en uitschuifsnelheid de helft mogen zijn.
- Voldoende uitslag. We wilden een grotere mogelijke uitslag dan bij het oude systeem. Maar omdat de nieuwe linear actuator de helft dichter bij de roeras zit is de uitslag sowieso al verdubbeld. De oude had een uitslag van 10 inch, voor de nieuwe zou dan dus ongeveer 6 inch ideaal zijn.
- Voldoende snelheid. De oude stuurautomaat had voldoende snelheid; we wilden ongeveer dezelfde snelheid aanhouden om de elektronica niet in verwarring te brengen. Maar omdat de nieuwe linear actuator de helft dichter bij de roeras zou komen zou de snelheid verdubbelen dus de halve snelheid zou ideaal zijn.
- Stroomverbruik. Dit is belangrijk op een zeilboot omdat tijdens het zeilen al je energie moet komen uit de zonnepanelen en de windgenerator. En de zonnepanelen werken 's nachts niet eens. En je wil ook niet je koelkast en navigatieapparatuur uitschakelen, dus elke ampere telt.
- Spatwaterbestendig. Geen verdere uitleg benodigd lijkt me.

Na ijverig zoeken en vergelijken vonden we op www.servocity.com een geschikt exemplaar in de rubriek "super duty". Een beest van een linear actuator die 450 Kilo aan duw- en trekkracht kan leveren en een statische belasting aankan van 3000 kilo! Ha! Laat nu die golven maar tegen het roer aanbeuken! Zelfs na correctie vanwege het dichter bij de roeras monteren komen we toch uit op een netto dynamische krachttoename van een factor drie vergeleken met de oude stuurautomaat. De slag die hij moet kunnen maken kun je opgeven bij de bestelling, dus dat werd 6 inch. De in- en uitschuifsnelheid zou ongeveer een derde bedragen, maar omdat hij veel dichter bij de roeras zit zou het uitkomen op een snelheid die maar weinig trager zou zijn dan bij de oude stuurautomaat. En dat was de onbelaste snelheid. We vermoeden dat de nieuwe servo veel minder "last" heeft van de remmende werking van het roer en dus zou de uiteindelijke snelheid wel eens hetzelfde kunnen zijn. Prima dus. De stroom zou 3 ampere bedragen, en bij een geschatte duty cycle van 10% zouden we het dus over 300 mA hebben. Dat een hele nacht lang is minder dan 4 Ah en dat is bij een accucapaciteit van 400 Ah dus minder dan 1% van de accucapaciteit. Ook al goed! En met een klassificatie IP65 zit het met de waterbestendigheid ook wel snor. En de prijs was maar 400 dollar want er stond niet het woord "boat" in de omschrijving. (Onder cruisers bestaat het vermoeden dat de aanduiding "boat" eigenlijk een afkorting is voor "Bring Out Another Thousand" ofwel "Breng duizend dollar extra mee").
Aansluiten en inbouwen
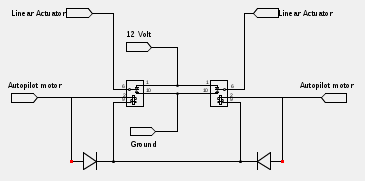
Bestellen is EEN, maar aansluiten en inbouwen is een ander verhaal. De besturing zou de defecte stuurautomaat voor zijn rekening kunnen nemen. De elektronica was nog prima net als het ingebouwde motortje; alleen de spindel om de steel in- en uit te schuiven was versleten. Maar de stuurautomaat gebruiken voor een andere taak daar was het ding natuurlijk nooit voor ontworpen: het bestuurt zijn eigen ingebouwde lichte motortje en heeft geen voorziening om iets anders aan te sturen. Daar moest dus iets op worden bedacht. En uiteraard moest de linear actuator op een of andere manier mechanisch aan de helmstok worden gekoppeld. Dat laatste werd een kwestie van meten, denken, nog een keer meten, een tekening maken en uiteindelijk met de werktekening naar het plaatselijke lasbedrijf om de benodigde RVS-montagebeugels te laten maken. De elektrische aansluiting is eigenlijk niet zo moeilijk als je een beetje verstand van elektra hebt. De draadjes van het oude motortje kun je aftappen maar het is niet verstandig om hier de veel zwaardere motor rechtstreeks mee aan te sturen. Dus hiervoor had ik twee relais besteld en middels twee diodes kon ik afhankelijk van de draairichting of het ene of het andere relais laten schakelen. De manier van schakelen zorgt er ook voor dat de motor wordt kortgesloten zodra de stuurstroom stopt waardoor de motor niet na iedere stuurpuls "uitloopt" maar netjes abrupt stopt.
De praktijk

De helmstok kunnen we met de hand niet tegenhouden als de linear acutator zijn werk doet, zo krachtig is hij! En de bediening met de oude stuurautomaat (die denkt dat hij alleen maar zijn eigen motortje bestuurt) werkt feilloos. Het enige minpuntje is dat het ingebouwde oude motortje is uitgevoerd met sensors die het draaien en de draairichting doorgeven aan het brein en dat het oude motortje dus verder nutteloos moet meesnorren omdat anders het brein alleen nog maar een "error" laat zien en ermee stopt. De sensors faken zou met een Arduino of zoiets wel moeten kunnen waardoor het oude motortje eruit gesloopt kan worden, maar uiteindelijk is er een grens waarbij je jezelf moet gaan afvragen of je niet beter een andere stuurautomaat kunt kopen of bouwen in plaats van de oude te blijven modificeren. De bedoeling was om een effectieve, snelle en niet al te dure oplossing te vinden om de reis verder met een betrouwbare zelfstuurinrichting te kunnen voortzetten en dat is met dit kleine project prima gelukt.


